
025-86200591

行走式机器人巡检系统云平台 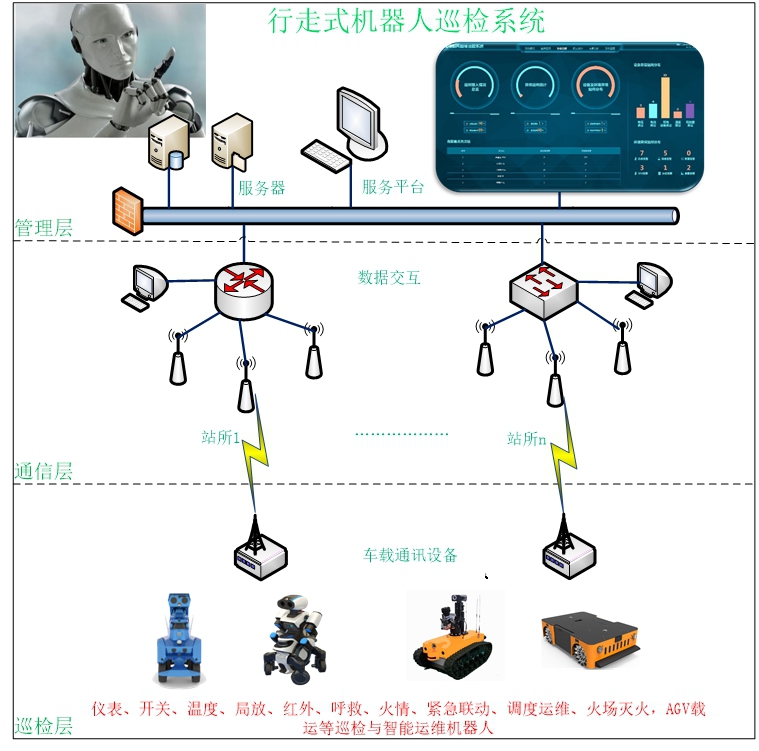 |
通常行走式巡检机器人是通过无线组网的方式实现与人的信息交互。如在变电站、所搭建无线局域网,巡检机器人经由无线车载通讯,通过无线局域网接入变电站、所的网络系统。如在生产、物流、仓库等场所搭建无线局域网,搬运机器人(AGV)经由无线车载通讯,通过无线局域网接入搬运场所的网络系统。
行走式机器人巡检系统架构主要分为三层次,第一层为感知层,第二层为通信层,最高层为管理层。每个层次分工不同,形成一个智能的整体。
巡检层:通过机器人完成对巡检现场设备运行及环境状态的数据采集、消防联动、呼救报警、搬运堆放等,同时机器人自身的中央处理系统,会根据现场安装的巡检状态和数据,将有效的、需及时处理的信息上传管理平台。如管理层的指令需机器人执行的,以管理层为优先;在没有管理层指令的情况下,机器人自行、准时准量地完成巡检任务。
通信层:通过无线组网的网络传输方式,将巡检、消防或搬运机器人的相关数据、画面、报警、指令、运动信息等及时准确地传输或下达指令,实现机器人系统的信息交互、运行流畅。
管理层:此层是人机交互、信息处理和下发指令的平台,通常是借用机器人运行场所的自有网络平台,对机器人巡检层上传的数据进行数据分析、存储和展示,也是管理者通过品台给机器人下达指令的接口,通过可视化和指令输入的方式,实现机器人系统与管理者的人机交互,友好运营管理。